I've recently installed my satellite dish and modified LNBF in my garden. This equipment will be used to receive Es'hail 2, the first geostationary satellite carrying an amateur radio transponder. Here I'll look at the hardware I'm using, how I did the alignment to the 25.5ºE geostationary orbital position where Es'hail 2 will be located, and how to have some fun scanning the direct broadcast satellites in the Ku band with a FUNCube Dongle Pro+.
The dish I'm using is a 95cm offset dish from diesl.es. It has an offset angle of 26º and a F/D of 0.5. This is probably the largest dish I could get very inexpensively, since the 110cm dish already costs 50% more. Using a gain calculator, this dish has a gain of 38.4dB at 10.5GHz. According to the preliminary link budget calculations, this is more than enough to receive Es'Hail 1 from my location, because the aim is for 75cm dishes to be usable in rainy areas at end of coverage, such as Brazil.
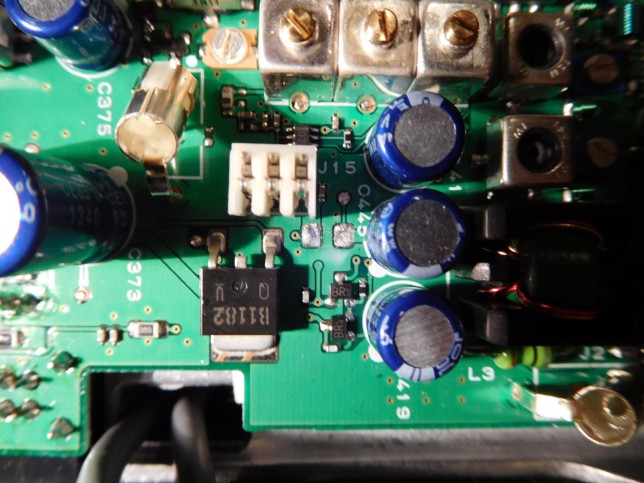
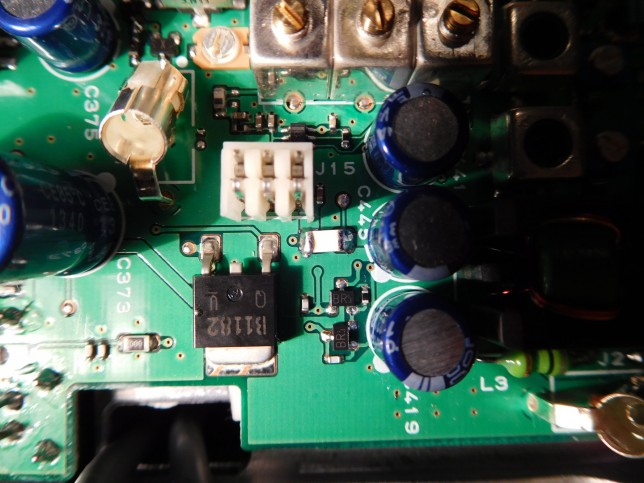
The LNBF I'm using is an Avenger PLL321S-2. I've removed its 27MHz crystal and installed a BNC connector to feed an external reference clock. I'm generating the 27MHz clock with the OCXO/Si5351A kit that I built recently. Although this kit includes a 27MHz OCXO, I'm using the Si5351A to generate the 27MHz reference, since this chip already outputs a 50 Ohm impedance signal. I intended to build a buffer amplifier to take the 27MHz signal directly from the crystal oscillator to get lower phase noise. However, the first designs of the buffer amplifier I built didn't work very well, and it seems that the phase noise from the Si5351A is adequate. Also, using the Si5351A allows me to feed a clock different from 27MHz to change the IF, although I probably won't need to do this, because I plan to use either an RTLSDR or a FUNCube Dongle Pro+.
I have aligned the dish to the 25.5ºE geostationary orbital position, which is where Es'hail 2 will be located. To do the dish alignment, I used the following method. I used an RTLSDR to receive the signal of one of the DVB-S/DVB-S2 channels which are broadcast by Es'hail 1, which is also on the 25.5ºE position. Of course, the DVB-S signal is about 20MHz wide and the RTLSDR is only 2.4MHz wide so this signal is just received as an increase in the noise floor in all the passband (actually, depending on the modulation you can see some pattern in the signal for some channels). Then I used x11vnc and a VNC client on my Android phone to connect to my computer remotely. In this way, I could move the dish and look at the signal on my phone. Then it is just a matter of moving the dish to peak the signal. I haven't been very careful in doing the alignment, so I reckon I could get about 1dB more by doing the alignment more carefully.
The thing with this method is that you have to know the frequency and polarization of one of the DVB-S channels. Also, it helps to start with the dish pointing towards the correct location. Otherwise you risk to pick up a different satellite which broadcasts on the same frequency. To do this pre-alignment, I just waited until the sun was in the same azimuth as the satellite and the I looked at the shadow of the LNBF to point the dish towards the sun. Elevation can be also preset, since many dishes have an elevation scale which already accounts for the offset angle. However, this is not so important. If you have the azimuth more or less set, then you can just swing the dish up and down slowly until you get some signal.
To get the frequency of one of the DVB-S channels broadcast by Es'hail 1, one can use any of the different web pages which are devoted to listing this information. For instance, see the listing by SatBeams. The problem with these listings is that they're only up to date for popular satellites, so one cannot trust very much that the information is current. With the 25.5ºE position there is also the problem that the 26ºE position, which is near enough, has several Arab direct broadcast satellites broadcasting in the Ku band. Thus, one has to be careful to identify to which of the satellites the signals correspond, because the 26ºE position can be received without problems with the dish pointing to Es'hail 1.
These considerations suggest the idea of plotting the frequency spectrum to get an idea of which satellites and frequencies we are receiving. I've used the FUNCube Dongle Pro+ instead of an RTLSDR because the FUNCube Dongle can receive across all the L band. To do the frequency scan, I've used FUN_Sweeper, which does exactly what I wanted: scan the power of a large chunk of spectrum and output it to a csv file. Probably another software could also be used, or I could program my own, but I just wanted some quick solution.
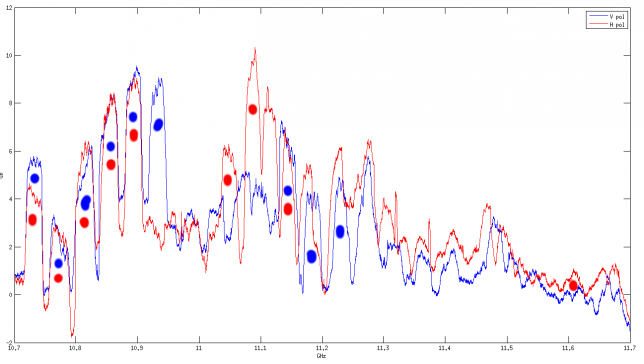
I have put the raw data on gist and used MATLAB to plot it.
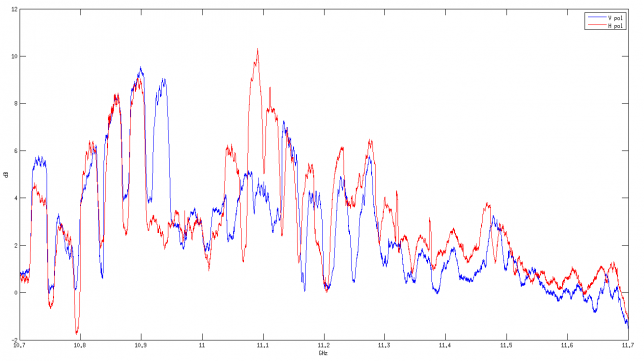
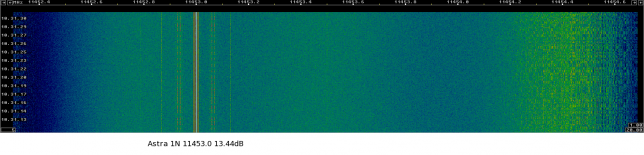
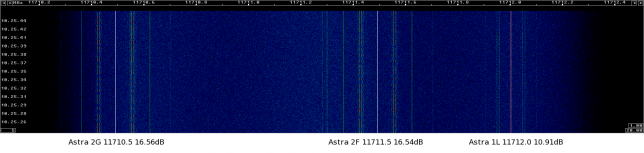
It seems that there are some problems for frequencies above 11.3GHz. Perhaps this is due to the bias tee I'm using to feed DC to the LNBF. I use just a simple inductor as an RF choke to block RF from flowing back into the power supply. Probably this inductor doesn't behave as a proper inductor for high frequencies in the L band.
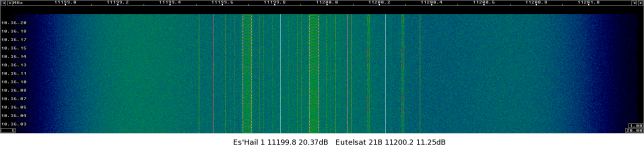
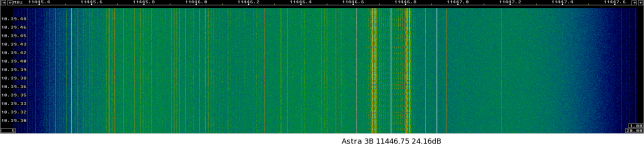
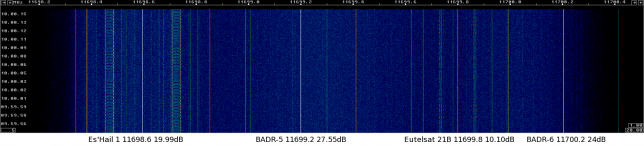
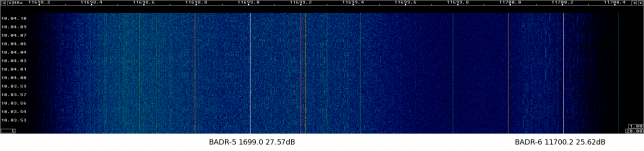
The signals in the lower part of the spectrum correspond to 5 DVB-S/DVB-S2 channels in the horizontal polarization and 6 DVB-S/DVB-S2 channels in the vertical polarization which are broadcast by BADR-5 from the 26ºE position. Arabasat has a nice channel listing where you can see the channels broadcast by the BADR satellites. Probably this information can be trusted to be current.
Es'hailSat doesn't have a good channel list, so the best strategy I have found to see what is currently broadcast by Es'hail 1 is to search for news of new channels in that satellite. Then I can go and check that this frequency is not used by any of the BADR satellites in 26ºE and if I receive something there I can have some confidence that it is transmitted by Es'hail 1. The news I've found are the following.
Al Jazeera HD is on 11045MHz horizontal polarization. Al Rayyan 2 is on 11142MHz vertical polarization. Al Araby is on 11142MHz horizontal polarization. All these three channels appear in my plot. Al Jazeera is on 11604MHz horizontal polarization. There is a small bump at this frequency in my plot, but I shouldn't trust that this part of the spectrum is accurate due to my setup.
Other channels in the plot that I have been able to identify are the following: 11228MHz vertical polarization (BADR-5). 11084MHz horizontal polarization and 11180MHz vertical polarization, which seems to be beIN on Es'Hail 1 according to SatBeams and LyngSat.
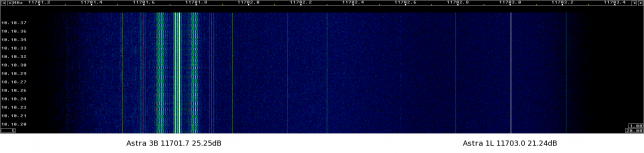
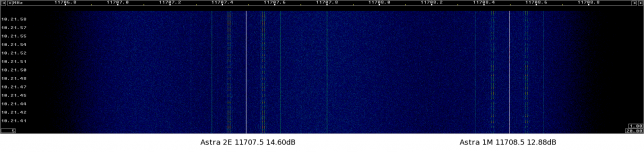
I've marked in the plot the channels I've been able to identify. As you can see, there are several signals which I could not identify. Perhaps I can use a DVB-S2 receiver to try to see what is on these frequencies.
A final remark is that today it is raining a little. It would be interesting to get scans on clear weather and on a really rainy day to try to see the effects of rain in the propagation.